Thruster Connections and Configurations
Derin Diver supports multiple thruster configurations. These configurations include Crab 6, Crab 8 and Crab 6 Pitch. For more different thruster configurations, please contact us via Degz Robotics Forum.
Supported Thruster Configurations (Derin Diver v0.9.0 and above)
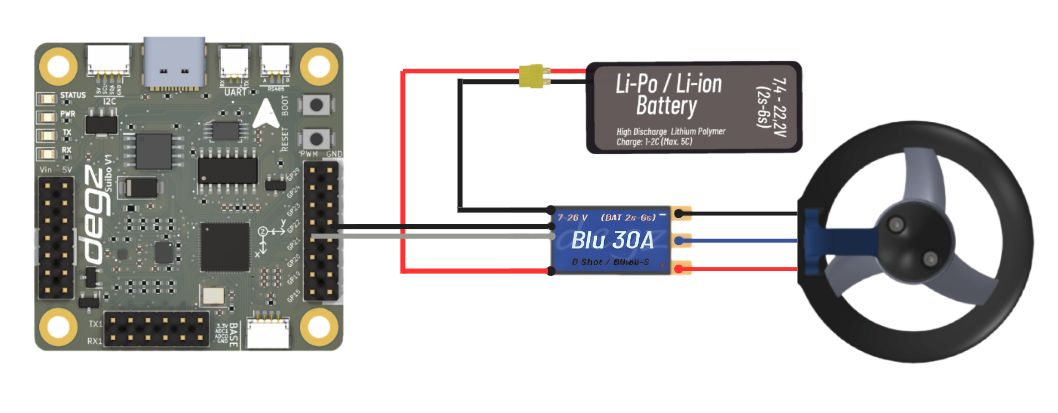
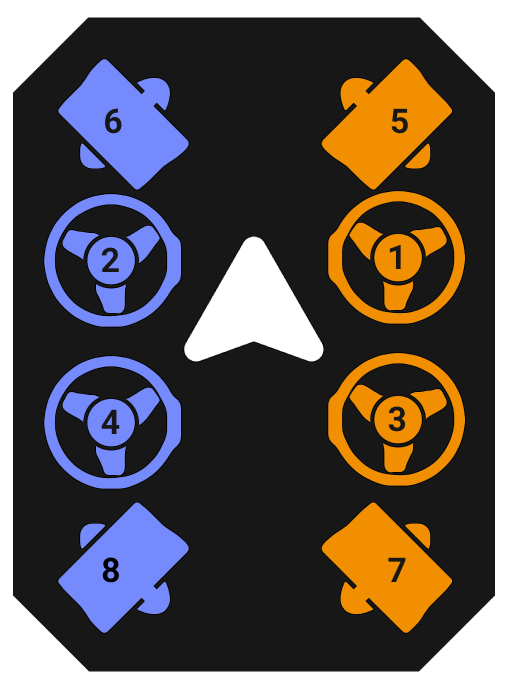
Thruster configurations should take into account the directions of the motors, the directions in which they give their maximum thrust and the directions of rotation. Thrusters shown in blue should rotate clockwise and thrusters shown in orange should rotate counterclockwise. On Dive Control, you can set the pins of the thrusters with the parameters MOTOR_1_PIN and their directions with the parameters MOTOR_1_REVERSE. The images below show which motor corresponds to which number.
Crab 6 Thruster Configuration
In the Crab 6 configuration, your underwater vehicle moves with 6 thrusters. Thrusters 1 and 2 allow the underwater vehicle to move up and down while providing stabilization in the roll axis. There is no control and stabilization in the pitch axis in this body type. Thrusters 3, 4, 5 and 6 are placed at 45-degree angles, giving the underwater vehicle the ability to move back and forth and left and right without angular rotation. This thruster configuration is the default in Derin Diver. This body type is selected when the FRAME_TYPE parameter is set to 0.

Crab 8 Thruster Configuration
In the Crab 8 configuration, your underwater vehicle supports 8 thrusters. In this way, it gains mobility in 6 axes. When using this body type, the center of gravity and center of density of your vehicle must be precisely adjusted. When the FRAME_TYPE parameter is set to 1, this body type is selected.
Crab 6 Pitch Thruster Configuration
It is the same as the Crab 6 configuration and allows the elevation motors to control the pitch axis instead of the roll axis. To use this configuration the FRAME_TYPE parameter must be set to 2.

How do I know the direction of the thruster?
To understand the direction of the thrusters, you can look at the angles of the propellers.The images below show propellers rotating in two different directions. The one on the left rotates clockwise, while the one on the right rotates counterclockwise.


Adjusting Thruster Settings
To set the pins of the thrusters, the pins to which the thrusters are connected can be set with the parameters MOTOR_1_PIN. In order to easily understand which motor is connected to which pin, you can enter the settings section on Dive Control and try all motors one by one in the System Test tab.
�📄️ What is Derin Diver?
Derin Diver is an Underwater Vehicle Software designed to be used on Degz Suibo Control Board. With this software you can easily provide manual and autonomous control of supported types of underwater vehicles. Thanks to the Dive Control interface that comes with Derin Diver, you can control, adjust and calibrate your underwater vehicles very easily. Deringezen X works with Derin Diver. Thanks to the Derin Commander Python software prepared for autonomous control, you can use Derin Diver in your autonomous projects very easily.
📄️ Derin Diver Setup
Before we can start using Derin Diver, we need to install Derin Diver on the Degz Suibo control board.
📄️ Thruster Connections and Configurations
Derin Diver supports multiple thruster configurations. These configurations include Crab 6, Crab 8 and Crab 6 Pitch. For more different thruster configurations, please contact us via Degz Robotics Forum.
📄️ Sensor Calibration
In order for Derin Diver to operate at full performance, the sensors on the control board must be calibrated.
📄️ First Dive and Controls
After completing the installation and calibration steps, you can start preparing for your first dive. If you are sure that you have completed thruster calibrations and sensor calibrations, you are ready for your first dive!