İtici Bağlantıları ve Konfigürasyonları
Derin Diver birden fazla itici konfigürasyonunu desteklemektedir. Bu konfigürasyonlar arasında Yengeç 6, Yengeç 8 ve Yengeç 6 Pitch bulunmaktadır. Daha farklı itici konfigürasyonları için bizimle Degz Robotics Forum üzerinden iletişime geçebilirsiniz.
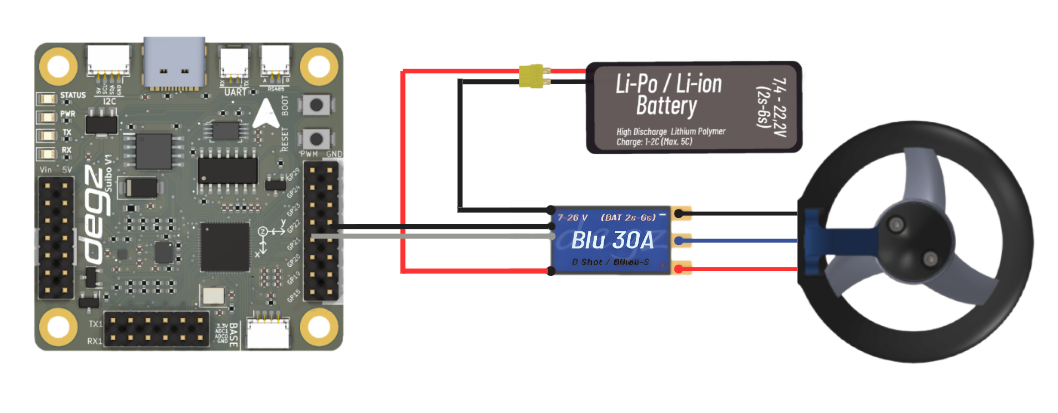
İticilere bağlı olan ESC'lerden çıkan PWM kabloları sırası farketmeksizin Degz Suibo'nun üzerindeki PWM headerlarına bağlanır. İticilerin dizilimleri ve yönlerinin ayarlanması Dive Control üzerinden yapılabilir. Aşağıdaki örnek bağlantı şemasını görebilirsiniz.
Desteklenen İtici Konfigürasyonları (Derin Diver v0.9.0 ve üzeri)
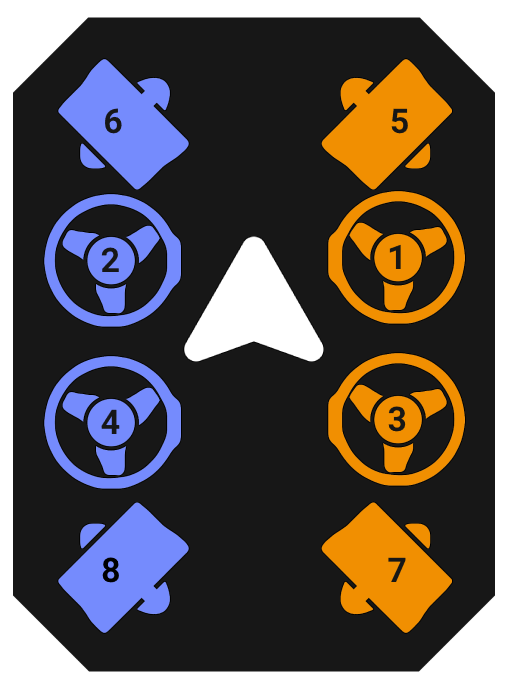
İtici konfigürasyonlarında motorların yönleri maksimum itkilerini verdikleri yönler ve dönüş yönleri göz önünde bulundurulmalıdır. Mavi ile gösterilen iticiler saat yönünde, turuncu ile gösterilen iticiler saat yönünün tersine dönmesi gerekmektedir. Dive Control üzerinde, iticilerin pinlerini MOTOR_1_PIN şeklindeki parametreler ile, yönlerini de MOTOR_1_REVERSE şeklindeki parametreler ile ayarlayabilirsiniz. Aşağıdaki görsellerde hangi motorun hangi numaraya denk geldiği gösterilmiştir.
Yengeç 6 İtici Konfigürasyonu
Yengeç 6 konfigürasyonunda su altı aracınız 6 itici ile hareket eder. 1 ve 2 numaralı iticiler su altı aracının aşağı yukarı gitmesini sağlarken aynı zamanda roll ekseninde stabilizasyon sağlar. Bu gövde tipinde pitch ekseninde kontrol ve stabilizasyon yoktur. 3, 4, 5 ve 6 numaralı iticilerin 45 derecelik açılarla yerleştirilmesi su altı aracını açısal olarak döndürmeden ileri geri ve sağa sola hareket etme kabiliyeti kazandırır. Bu itici konfigürasyonu Derin Diver'da varsayılandır. FRAME_TYPE parametresi 0 olarak ayarlandığında bu gövde tipi seçilmiş olur.

Yengeç 8 İtici Konfigürasyonu
Yengeç 8 konfigürasyonunda su altı aracınız 8 iticiyi destekler. Bu sayede 6 eksende hareket kabiliyeti kazanmış olur. Bu gövde türünü kullanırken aracınız�ın ağırlık merkezini ve yoğunluk merkezinin tam ayarlanmış olması gerekmektedir. FRAME_TYPE parametresi 1 olarak ayarlandığında bu gövde tipi seçilmiş olur.
Yengeç 6 Pitch İtici Konfigürasyonu
Yengeç 6 konfigürasyonu ile aynı olup yükseliş motorlarının roll ekseni yerine pitch eksenini kontrol etmesini sağlar. Bu konfigürasyonu kullanabilmek için FRAME_TYPE parametresi 2 olarak ayarlanmalıdır.

İticinin Yönünü Nasıl Anlarım?
İticilerin yönlerini anlamak için pervanelerin açılarına bakabilirsiniz. Aşağıdaki görsellerde iki farklı yöne dönen pervane gösterilmiştir. Soldaki saat yönünde dönerken, sağdaki saatin tersi yönde döner.


İtici Ayarlarının Yap�ılması
İticilerin pinlerinin ayarlanması için iticilerin bağlı olduğu pinler MOTOR_1_PIN şeklindeki parametreler ile ayarlanabilir. Hangi motorun hangi pine bağlı olduğunu rahatça anlayabilmek için Dive Control üzerinden ayarlar kısmına girip System Test sekmesinde tüm motorları teker teker deneyebilirsiniz.
📄️ Derin Diver Nedir?
Derin Diver, Degz Suibo Kontrol Kartı üzerinde kullanılmak üzere tasarlanmış bir Su Altı Aracı Yazılımıdır. Bu yazılım sayesinde desteklenen tipteki su altı araçlarının manuel ve otonom kontrolünü kolaylıkla sağlayabilirsiniz. Derin Diver ile birlikte gelen Dive Control arayüzü sayesinde çok kolay bir şekilde su altı araçlarınızın kontrolünü sağlayıp, ayarlarını ve kalibrasyonlarını yapabilirsiniz. Deringezen X, Derin Diver ile çalışmaktadır. Otonom kontrol için hazırlanan Derin Commander Python yazılımı sayesinde Derin Diver'ı çok kolay bir şekilde otonom projelerinizde de kullanabilirsiniz.
📄️ Derin Diver Kurulumu
Derin Diver'ı kullanmaya başlamadan önce Degz Suibo kontrol kartına Derin Diver'ı yüklememiz gerek. Degz Suibo kontrol kartı RP2040 mikroişlemcisini kullanmakta olup yazılım yükleme süreci UF2 dosyası ile yapılmaktadır.
📄️ İtici Bağlantıları ve Konfigürasyonları
Derin Diver birden fazla itici konfigürasyonunu desteklemektedir. Bu konfigürasyonlar arasında Yengeç 6, Yengeç 8 ve Yengeç 6 Pitch bulunmaktadır. Daha farklı itici konfigürasyonları için bizimle Degz Robotics Forum üzerinden iletişime geçebilirsiniz.
📄️ Sensör Kalibrasyonu
Derin Diver'ın tam performanslı çalışabilmesi için kontrol kartının üzerindeki sensörlerin kalibre olması gerekmektedir.
📄️ İlk Dalış ve Kontroller
Kurulum ve kalibrasyon adımlarını tamamladıktan sonra ilk dalış için hazırlıklara başlayabilirsiniz. İtici kalibrasyonlarını, sensör kalibrasyonlarını tamamladığınıza eminseniz ilk dalış için hazırsınız!