Octomini - Underwater Controller
This product has been removed from the production. For an alternative you can chek this Degz Suibo
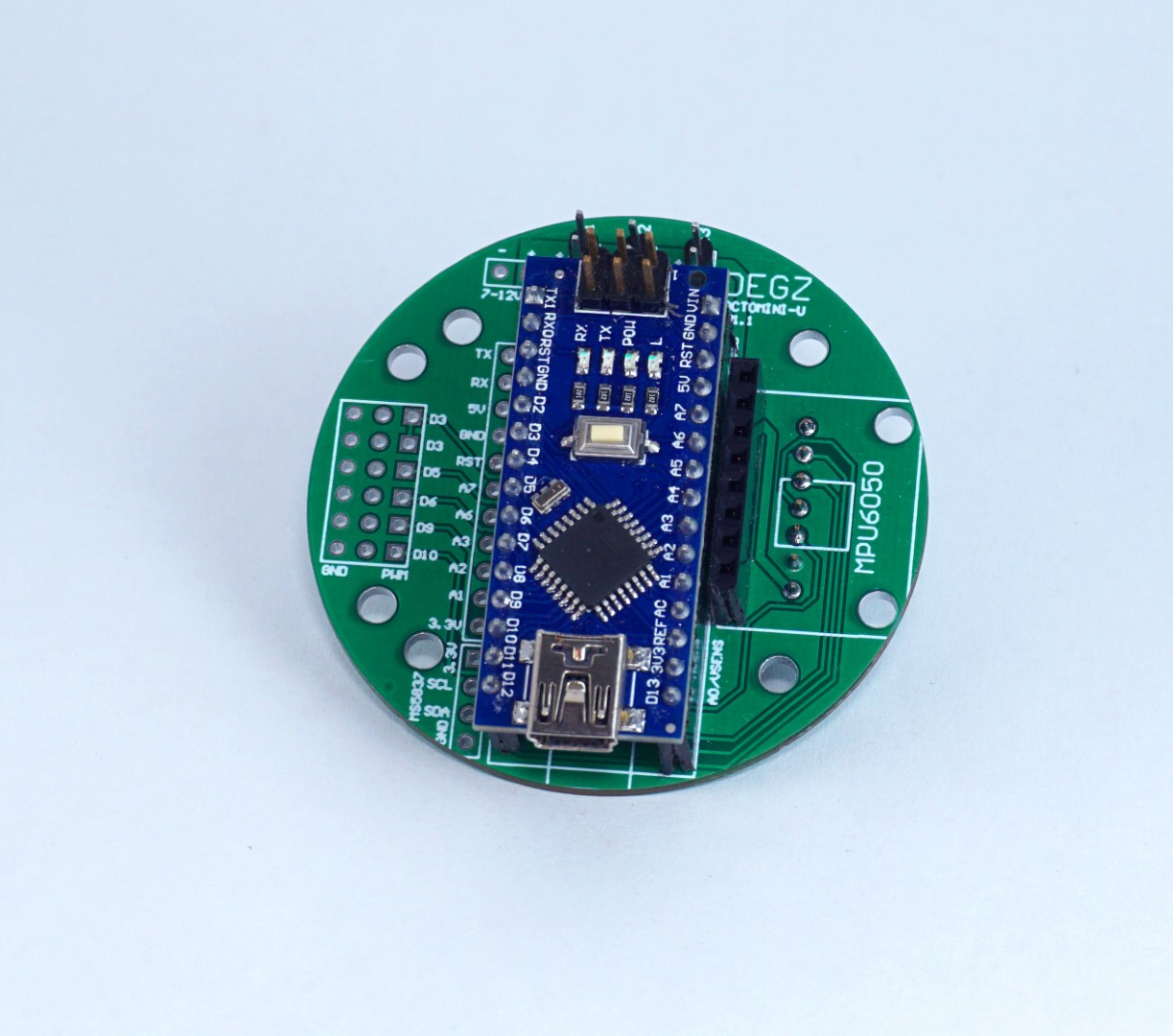
Octomini is a developer board based on the Arduino Nano microcontroller and designed specifically for unmanned underwater vehicles. The board is small in size, under 55mm in diameter, and inspired by the FPV (First Person View) stack design to increase portability and ease of use. Thanks to the switching elements on it, it allows to control auxiliary systems of underwater vehicles such as lighting, gripper arms or sampling devices from the surface. Technically it offers five plus one PWM (Pulse Width Modulation) outputs and provides stabilization with the Mpu6050 gyroscope. Communication over a theoretical distance of up to 400 meters is supported via the Canbus communication module. It can take supply voltage from 7 to 12 Volts and can control three different devices with a switching capacity of up to 5 amps. The board is equipped with features such as pressure sensor input, voltage measurement and extra analog pins. Both Octomini's software and hardware are fully open source, allowing users to download and customize the software or contribute to the project.
Technical Specifications of the product
About the Card
| Feature | Value |
|---|---|
| Number of output pwm pins | 5+1 Pin |
| Microcontroller | Arduino Nano |
| Stabilization | Gyro - Mpu6050 |
| Communication module | Canbus |
| Distance | 400 meters (theoretical) |
| Supply voltage | 7-12 Volts |
| Switching | 3 devices, 5amps max |
Additional Features
- Pressure sensor input
- Voltage measurement
- Auxiliary analog pins
Octomini consists entirely of open source software and hardware. If you would like to download the software or contribute, you can click here!
This product has been removed from the production. For an alternative you can chek this Degz Suibo
You can reach us through the forum for questions and suggestions